II – Thuật toán
Tên phương pháp mà chúng ta đang nghiên cứu tên là Gradient Based Method!
Vậy Gradient ở đây là cái gì?
Tóm Tắt
Gradient
Gradient là một vector có các thành phần biểu thị tốc độ thay đổi giá trị của điểm ảnh theo 2 hướng x và y, hay có thể nói là nó đại diện cho sự thay đổi về hướng và độ lớn của một vùng ảnh.
Các thành phần của gradient được tính như sau: (Tính như công thức tính đạo hàm thông thường thôi!)
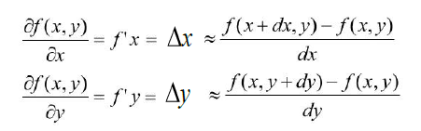
Như vậy ta có ta có vector gradient là G(f’x,f’y).
[Đến đây ta đã hiểu Gradient là cái gì và cách tính nó ra sao! Ở đây ta tạm gác lại câu hỏi f(x,y) nó là gì và tính như thế nào! Ta nên xem kỹ lại công thức 1 lần nữa cho thấm!]
Với dx, dy lần lượt là khoảng cách giữa 2 điểm lân cận theo chiều x và chiều y.
(Ta có thể xem dx, dy là số lượng điểm ảnh giữa 2 điểm.)
Thực tế ta chọn dx = dy = 1 (ta tính lân cận tức là điểm ngay cạnh nó, nên có thể coi khoảng cách của chúng là 1) tại điểm có tọa độ là (i,j), thay vào công thức trên ta được:
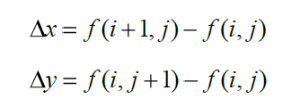
[Sau khi thay vào thì công thức nó chỉ còn đơn giản thế này thôi! Thay thử vào mà xem đúng không?!]
Do tính chất phức tạp trong tính toán khi áp dụng phương pháp Gradient trong xử lý ảnh, người ta sử dụng kỹ thuật Gradient dùng cặp mặt nạ Hx, Hy trực giao (theo 2 hướng vuông góc).
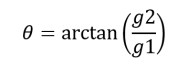
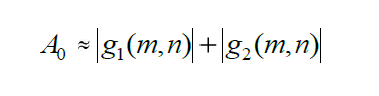
Nếu định nghĩa g1 (f’x), g2 (f’y) là Gradient (vector gradient thành G(g1,g2)) theo hai hướng x, y tướng ứng thì biên độ (tức độ lớn) g(m,n) và hướng của biên tại điểm (m,n) được tính như sau:

Để giảm độ phức tạp tính toán, A0 được tính gần đúng như sau:
Việc tính xấp xỉ đạo hàm bậc nhất (f’x và f’y ở đây là g1 và g2) theo các hướng x và y được thực hiện thông qua 2 mặt nạ nhân chập (toán tử đạo hàm), tương ứng sẽ cho ta các kỹ thuật phát hiện biên khác nhau tương ứng với mặt nạ mà nó sử dụng (Roberts, Sobel, Prewitt,..).
[Như vậy công việc tiếp theo của chúng ta là phải tính g1, g2 thông qua 2 cái mặt nạ H1 và H2 mà chúng ta chọn]
Chọn mặt nạ/toán tử – Edge Operators
Trong phương pháp này chúng ta có nhiều loại mặt nạ (toán tử) để chọn! Sau đây là một số loại mặt nạ tiêu biểu!
Robert Operator (Robert Cross)
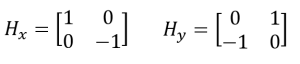
http://homepages.inf.ed.ac.uk/rbf/HIPR2/roberts.htm
Sobel Operator
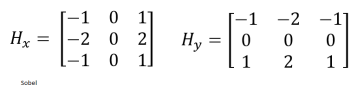
http://en.wikipedia.org/wiki/Sobel_operator
Prewitt Operator
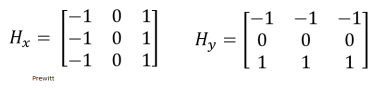
http://en.wikipedia.org/wiki/Prewitt_operator
Thuật toán
Đầu vào:
– Ma trận ảnh.
– Ma trận toán tử/mặt nạ.
– Ngưỡng
Đầu ra:
– Ma trận ảnh gồm các đường biên.
Giải thuật
FOR(các điểm của ảnh : I(i,j)) { if(nếu là điểm nằm trên đường viền) I(i,j) = 0; else{ - Tính Gx (g1) : Nhân chập với Hx - Tính Gy (g2) : Nhân chập với Hy - Tính A = |Gx| + |Gy| - I(i,j) = A >= ngưỡng ? 0 : 1; } }Cách tính với mặt nạ
Chúng ta đã qua 2 phần khó khăn nhất! Giờ chỉ còn công việc lập trình thôi! Tiếp…
(Một số kỹ thuật khác như kỹ thuật “La Bàn” thì tính theo cả 8 hướng. Ở đây ta làm với phương pháp 2 hướng trước.)